Od MLP do CNN. Sieci neuronowe do rozpoznawania cyfr MNIST
Budujemy i porównujemy cztery architektury sieci neuronowych w PyTorch, wizualizujemy wydajność, badamy złożoność w porównaniu do dokładności i pokazujemy, dlaczego CNN-y są najlepsze w klasyfikacji obrazów.

Daniel Gustaw
• 14 min read
Wprowadzenie
Zbiór danych MNIST to klasyczny punkt odniesienia w sztucznej inteligencji, składający się z 70 000 grayscale obrazów ręcznie pisanych cyfr (28×28 pikseli). Jest wystarczająco mały, aby szybko trenować, ale wystarczająco złożony, aby ujawniać różnice w wydajności modeli—idealny do eksperymentów z sieciami neuronowymi.
Podczas gdy Wielowarstwowe Perceptrony (MLP) mogą technicznie klasyfikować dane obrazowe, traktują piksele jako płaskie wektory, ignorując wzorce przestrzenne. Konwolucyjne Sieci Neuronowe (CNN), z drugiej strony, są zaprojektowane do wykorzystania lokalnych struktur w obrazach—krawędzi, krzywych, tekstur—co czyni je znacznie bardziej efektywnymi w zadaniach wizualnych.
W tym wpisie porównam cztery architektury: prosty MLP, minimalny TinyCNN, zbalansowany CNN oraz cięższy StrongCNN. Przyjrzymy się dokładności, czasowi treningu oraz liczbie parametrów, aby zrozumieć kompromisy.
Przygotowanie danych
Jak wspomniano wcześniej, korzystamy ze zbioru danych MNIST, dostępnego wygodnie przez torchvision.datasets. W zaledwie kilku linijkach kodu pobieramy i ładujemy dane, stosujemy podstawową transformację i przygotowujemy je do treningu:
from torchvision import datasets, transforms
transform = transforms.ToTensor()
train_data = datasets.MNIST(
root="./data", train=True, download=True, transform=transform
)
test_data = datasets.MNIST(
root="./data", train=False, download=True, transform=transform
)Jedynym krokiem przetwarzania wstępnego tutaj jest transforms.ToTensor(), który konwertuje każde zdjęcie na tensor PyTorch i normalizuje jego wartości pikseli do zakresu [0.0, 1.0].
from torch.utils.data import DataLoader
BATCH_SIZE = 64
train_loader = DataLoader(train_data, batch_size=BATCH_SIZE, shuffle=True)
test_loader = DataLoader(test_data, batch_size=BATCH_SIZE)Tasowanie danych treningowych unika zapamiętywania kolejności cyfr. Dla zestawu testowego pomijamy tasowanie, ale nadal używamy pakowania dla efektywności.
Możemy wyświetlić kilka przykładowych obrazów, aby zwizualizować zestaw danych:
import matplotlib.pyplot as plt
images, labels = next(iter(train_loader))
plt.figure(figsize=(6, 6))
for i in range(9):
plt.subplot(3, 3, i + 1)
plt.imshow(images[i][0], cmap="gray")
plt.title(f"Label: {labels[i].item()}")
plt.axis("off")
plt.tight_layout()
plt.savefig("mnist_digits.svg")
plt.show()
Trening i Ocena
Teraz, gdy nasze dane są gotowe, czas nauczyć nasze modele czytać ręcznie napisane cyfry. Aby to zrobić, definiujemy standardową pętlę treningową i oceny, używając idiomatycznej struktury PyTorch. Będziemy również śledzić złożoność modelu za pomocą prostej licznika parametrów — przydatne podczas porównywania różnych architektur.
Ustawienia Urządzenia i Epoki
Najpierw sprawdzamy, czy dostępny jest GPU. Jeśli tak, trening odbędzie się na CUDA; w przeciwnym razie korzystamy z CPU. Ustawiamy też rozsądny czas trwania treningu:
import torch
EPOCHS = 5
DEVICE = torch.device("cuda" if torch.cuda.is_available() else "cpu")Pięć epok może nie brzmieć jak dużo, ale na MNIST często wystarcza, aby uzyskać zaskakująco dobre wyniki — nawet z podstawowymi modelami.
Pętla treningowa
Oto nasza funkcja train(). To najbardziej standardowy kod: ustawienie modelu w trybie treningowym, pętla po partiach, obliczenie straty i aktualizacja wag.
def train(model, loader, optimizer, criterion):
model.train()
for x, y in loader:
x, y = x.to(DEVICE), y.to(DEVICE)
optimizer.zero_grad()
output = model(x)
loss = criterion(output, y)
loss.backward()
optimizer.step()Ta funkcja nic nie zwraca—po prostu aktualizuje wewnętrzne parametry modelu. Podczas treningu nie zależy nam jeszcze na dokładności. Sprawdzimy to później.
Pętla ewaluacyjna
Po treningu oceniamy na zbiorze testowym. Model jest ustawiony w tryb eval(), gradienty są wyłączone, a my zbieramy dwa metryki: dokładność i średnią stratę krzyżową.
import torch.nn.functional as F
def test(model, loader):
model.eval()
correct = 0
total = 0
total_loss = 0.0
with torch.no_grad():
for x, y in loader:
x, y = x.to(DEVICE), y.to(DEVICE)
output = model(x)
loss = F.cross_entropy(output, y)
total_loss += loss.item()
preds = output.argmax(dim=1)
correct += (preds == y).sum().item()
total += y.size(0)
avg_loss = total_loss / len(loader) # average over batches
return correct / total, avg_lossZauważ, że obliczamy średnią stratę dla partii — a nie pojedynczych przykładów. To dobre zrównoważenie między śledzeniem wydajności a prostotą.
Liczba parametrów
Zanim porównamy architektury, warto wiedzieć, ile trenowalnych parametrów ma każda z nich. To małe narzędzie daje nam ich liczbę:
def count_params(model):
return sum(p.numel() for p in model.parameters() if p.requires_grad)Spoiler: StrongCNN ma ponad 450,000 parametrów, podczas gdy TinyCNN radzi sobie z tylko kilkoma tysiącami. To ogromna różnica — i świetny punkt wyjścia do głębszej analizy.
Uruchamiacz eksperymentów
Na koniec łączymy wszystko w jedną funkcję, która trenuje model, mierzy czas procesu, ocenia na zbiorze testowym i drukuje krótkie podsumowanie:
import time
import torch.optim as optim
import torch.nn as nn
def run_experiment(model_class, name):
model = model_class().to(DEVICE)
optimizer = optim.Adam(model.parameters())
criterion = nn.CrossEntropyLoss()
print(f"\n{name} ({count_params(model)} parameters)")
start = time.time()
for epoch in range(EPOCHS):
train(model, train_loader, optimizer, criterion)
duration = time.time() - start
acc, loss = test(model, test_loader)
print(f"Test Accuracy: {acc * 100:.2f}% | Loss: {loss:.2f} | Learning time: {duration:.1f}s")Ta struktura jest wystarczająco elastyczna, aby działać z każdą klasą modelu, którą przekażesz — od prostych MLP po głębokie potwory konwolucyjne.
W następnej sekcji zdefiniujemy i przeanalizujemy cztery architektury: MLP, TinyCNN, CNN i StrongCNN.
Model 1: Perceptron wielowarstwowy (MLP)
Najprostsza architektura, którą rozważamy, to klasyczny Perceptron wielowarstwowy (MLP). Traktuje każdy obraz 28×28 jako płaski wektor 784 pikseli, ignorując strukturę przestrzenną, ale wciąż zdolny do uczenia się użytecznych cech poprzez warstwy w pełni połączone.

import torch.nn as nn
class MLP(nn.Module):
def __init__(self):
super().__init__()
h = 32 # number of hidden units
self.model = nn.Sequential(
nn.Flatten(), # Flatten 28x28 image into a vector of length 784
nn.Linear(28 * 28, h), # Fully connected layer: 784 → 32
nn.ReLU(), # Non-linear activation
nn.Linear(h, 10) # Output layer: 32 → 10 classes
)
def forward(self, x):
return self.model(x)Wyjaśnienie
- Flatten przekształca 2-wymiarowy obraz wejściowy w 1-wymiarowy wektor.
- Pierwsza warstwa Linear projektuje ten wektor wejściowy w 32-wymiarową przestrzeń ukrytą.
- Aktywacja ReLU wprowadza nieliniowość, aby nauczyć się złożonych wzorców.
- Ostatnia warstwa Linear generuje logity dla 10 klas cyfr.
Ten mały MLP ma stosunkowo niewiele parametrów i szybko się uczy, ale nie uchwyca relacji przestrzennych między pikselami, co ogranicza jego dokładność w przypadku danych obrazowych.
Wywoływanie
run_experiment(MLP, "MLP")powinieneś zobaczyć:
MLP (25450 parameters)
Test Accuracy: 95.96% | Loss: 0.14 | Learning time: 8.7sTo będzie nasz punkt odniesienia do porównania modeli cnn.
Model 2: TinyCNN — Minimalna Konwolucyjna Sieć Neuronowa
Następnie przedstawiamy prostą architekturę TinyCNN, która wykorzystuje warstwy konwolucyjne do uchwycenia wzorców przestrzennych w obrazach. Ten model jest lekki, ale znacznie potężniejszy niż MLP w zadaniach związanych z obrazami.
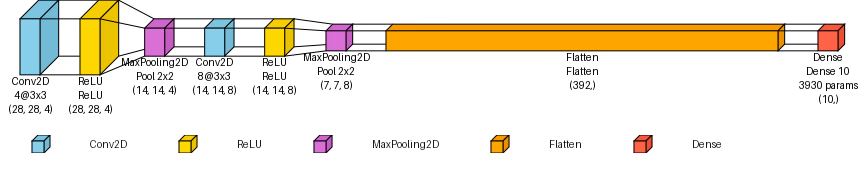
Poniższy rysunek ilustruje architekturę TinyCNN:

import torch.nn as nn
class TinyCNN(nn.Module):
def __init__(self):
super().__init__()
self.net = nn.Sequential(
nn.Conv2d(1, 4, kernel_size=3, padding=1), # 1x28x28 → 4x28x28
nn.ReLU(),
nn.MaxPool2d(2), # 4x14x14
nn.Conv2d(4, 8, kernel_size=3, padding=1), # 8x14x14
nn.ReLU(),
nn.MaxPool2d(2), # 8x7x7
nn.Flatten(),
nn.Linear(8 * 7 * 7, 10) # Direct to output layer
)
def forward(self, x):
return self.net(x)Przegląd architektury
- Sieć rozpoczyna się od warstwy konwolucyjnej, która przekształca dane wejściowe z 1 kanału do 4 kanałów, zachowując wymiary przestrzenne dzięki paddingowi.
- Aktywacja ReLU dodaje nieliniowości.
- MaxPooling zmniejsza rozmiar przestrzenny o połowę do 14×14, co redukuje koszty obliczeniowe i zapewnia inwarancję przestrzenną.
- Druga konwolucja rozszerza mapy cech z 4 do 8 kanałów.
- Kolejna ReLU i max-pooling zmniejszają rozmiar mapy cech do 7×7.
- Na koniec cechy są spłaszczane i przekazywane bezpośrednio do warstwy liniowej, która generuje logity dla 10 klas cyfr.
======================================================================
Layer (type:depth-idx) Output Shape Param #
======================================================================
TinyCNN [64, 10] --
├─Sequential: 1-1 [64, 10] --
│ └─Conv2d: 2-1 [64, 4, 28, 28] 40
│ └─ReLU: 2-2 [64, 4, 28, 28] --
│ └─MaxPool2d: 2-3 [64, 4, 14, 14] --
│ └─Conv2d: 2-4 [64, 8, 14, 14] 296
│ └─ReLU: 2-5 [64, 8, 14, 14] --
│ └─MaxPool2d: 2-6 [64, 8, 7, 7] --
│ └─Flatten: 2-7 [64, 392] --
│ └─Linear: 2-8 [64, 10] 3,930
======================================================================
Total params: 4,266
Trainable params: 4,266
Non-trainable params: 0
Total mult-adds (Units.MEGABYTES): 5.97
======================================================================
Input size (MB): 0.20
Forward/backward pass size (MB): 2.41
Params size (MB): 0.02
Estimated Total Size (MB): 2.63
======================================================================Czasami cnn są przedstawiane graficznie jako następujący proces:
Najciekawsze jest to, że uzyskujemy lepsze wyniki niż mlp mając tylko 4266 parametrów zamiast 25450.
Tiny CNN (4266 parameters)
Test Accuracy: 97.96% | Loss: 0.06 | Learning time: 12.3sZ mniejszą siecią o kilka razy możemy oczekiwać połowy błędów w porównaniu do poprzedniego modelu.
Sprawdźmy, jak nasza sieć poprawiłaby się, gdybyśmy utrzymali podobną liczbę parametrów jak w oryginalnym MLP.
Model 3: CNN — Zrównoważona Konwolucyjna Sieć Neuronowa
Teraz, gdy zobaczyliśmy, co może zrobić minimalny model konwolucyjny, zwiększmy nieco skalę.

Model CNN poniżej został zaprojektowany w celu utrzymania zrównoważonego kompromisu między liczbą parametrów a wydajnością. Rozszerza możliwości ekstrakcji cech TinyCNN, wykorzystując więcej filtrów i ukrytą warstwę liniową przed ostatecznym wyjściem.
class CNN(nn.Module):
def __init__(self):
super().__init__()
self.net = nn.Sequential(
nn.Conv2d(1, 8, kernel_size=3, padding=1), # 1x28x28 → 8x28x28
nn.ReLU(),
nn.MaxPool2d(2), # 8x14x14
nn.Conv2d(8, 16, kernel_size=3, padding=1), # 16x14x14
nn.ReLU(),
nn.MaxPool2d(2), # 16x7x7
nn.Flatten(),
nn.Linear(16 * 7 * 7, 32), # Dense layer with 32 units
nn.ReLU(),
nn.Linear(32, 10) # Final output layer
)
def forward(self, x):
return self.net(x)Podział Architektury
W porównaniu do TinyCNN, ten model:
- Podwaja liczbę filtrów konwolucyjnych (8 → 16), co pozwala na uchwycenie bogatszych wzorców wizualnych.
- Dodaje ukrytą warstwę w pełni połączoną z 32 neuronami przed wyjściem. Ta dodatkowa warstwa poprawia zdolność modelu do łączenia wyodrębnionych cech przed dokonaniem ostatecznej klasyfikacji.
- Nadal korzysta tylko z dwóch warstw konwolucyjnych i dwóch warstw poolingowych, co sprawia, że model jest stosunkowo lekki i szybki.
W poniższej tabeli znajdują się wszystkie warstwy, kształty wyjścia i parametry bez wymiaru wsadowego:
| Warstwa | Kształt Wyjścia | Parametry |
|---|---|---|
| Conv2d (1→8, 3×3) | 8×28×28 | 80 |
| ReLU | 8×28×28 | 0 |
| MaxPool2d | 8×14×14 | 0 |
| Conv2d (8→16, 3×3) | 16×14×14 | 1,168 |
| ReLU | 16×14×14 | 0 |
| MaxPool2d | 16×7×7 | 0 |
| Flatten | 784 | 0 |
| Linear (784 → 32) | 32 | 25,120 |
| ReLU | 32 | 0 |
| Linear (32 → 10) | 10 | 330 |
| Razem | — | 26,698 |

Z 26,698 parametrami, ten CNN ma rozmiar porównywalny z MLP (25,450), ale jest znacznie potężniejszy.
CNN (26698 parameters)
Test Accuracy: 98.22% | Loss: 0.05 | Learning time: 14.3sKluczowe obserwacje
-
Zwiększenie dokładności: Model skacze do 98.22% dokładności, poprawiając wyniki zarówno w porównaniu do
MLP, jak iTinyCNN. -
Efektywność parametrów: Pomimo podobnej liczby parametrów do MLP, ten CNN wykorzystuje wzorce przestrzenne poprzez konwolucję, aby osiągnąć lepszą wydajność.
-
Gotowość do wnioskowania: Rozmiar i szybkość tego modelu sprawiają, że nadaje się do aplikacji lekkich i rozpoznawania cyfr w czasie rzeczywistym.
Ten model demonstruje idealny punkt: dobrą głębokość, rozsądny rozmiar parametrów i doskonałą dokładność. Ale co jeśli w ogóle nie zależałoby nam na rozmiarze i chcieliśmy jeszcze bardziej zwiększyć wydajność?
Dowiedzmy się w następnej sekcji.
Model 4: StrongCNN — Głęboki konwolucyjny potwór
Jak dotąd przyjrzeliśmy się modelom, które balansują wydajność i prostotę. Ale co jeśli usuniemy ograniczenia i postawimy wszystko na wydajność?

StrongCNN to głębsza, bardziej ekspresyjna architektura, która wprowadza wiele warstw konwolucyjnych, wyższą liczbę kanałów i techniki regularizacji, takie jak Dropout, aby zapobiec przeuczeniu. Jest inspirowana najlepszymi praktykami z większych modeli wizji, ale wciąż na tyle kompaktowa, aby szybko trenować na MNIST.
class StrongCNN(nn.Module):
def __init__(self):
super().__init__()
self.net = nn.Sequential(
nn.Conv2d(1, 32, 3, padding=1), # 1x28x28 → 32x28x28
nn.ReLU(),
nn.Conv2d(32, 32, 3, padding=1), # 32x28x28
nn.ReLU(),
nn.MaxPool2d(2), # 32x14x14
nn.Dropout(0.25),
nn.Conv2d(32, 64, 3, padding=1), # 64x14x14
nn.ReLU(),
nn.Conv2d(64, 64, 3, padding=1), # 64x14x14
nn.ReLU(),
nn.MaxPool2d(2), # 64x7x7
nn.Dropout(0.25),
nn.Flatten(),
nn.Linear(64 * 7 * 7, 128),
nn.ReLU(),
nn.Dropout(0.5),
nn.Linear(128, 10)
)
def forward(self, x):
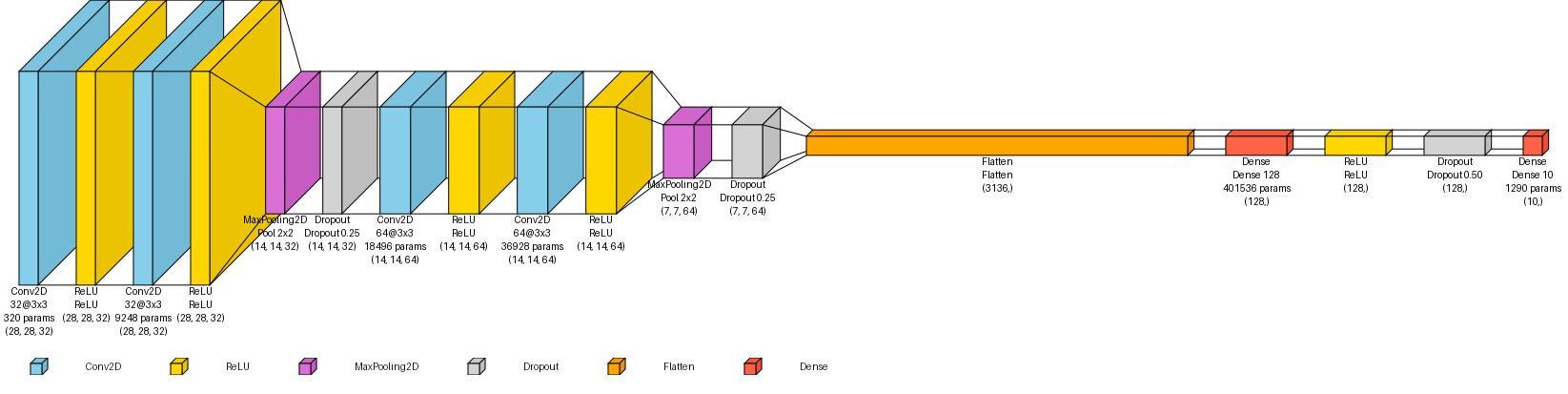
return self.net(x)Rozbicie architektury
Ten model składa się z czterech warstw konwolucyjnych w dwóch blokach, z rosnącą liczbą filtrów (32 → 64). Po każdym bloku:
- Stosujemy MaxPool2d(2) w celu zmniejszenia rozmiaru.
- Stosujemy Dropout w celu redukcji nadmiernego dopasowania.
- Na końcu cechy są spłaszczane i przekazywane przez dwie w pełni połączone warstwy z warstwą ukrytą zawierającą 128 neuronów oraz kolejnym dropoutem.
======================================================================
Layer (type:depth-idx) Output Shape Param #
======================================================================
StrongCNN [64, 10] --
├─Sequential: 1-1 [64, 10] --
│ └─Conv2d: 2-1 [64, 32, 28, 28] 320
│ └─ReLU: 2-2 [64, 32, 28, 28] --
│ └─Conv2d: 2-3 [64, 32, 28, 28] 9,248
│ └─ReLU: 2-4 [64, 32, 28, 28] --
│ └─MaxPool2d: 2-5 [64, 32, 14, 14] --
│ └─Dropout: 2-6 [64, 32, 14, 14] --
│ └─Conv2d: 2-7 [64, 64, 14, 14] 18,496
│ └─ReLU: 2-8 [64, 64, 14, 14] --
│ └─Conv2d: 2-9 [64, 64, 14, 14] 36,928
│ └─ReLU: 2-10 [64, 64, 14, 14] --
│ └─MaxPool2d: 2-11 [64, 64, 7, 7] --
│ └─Dropout: 2-12 [64, 64, 7, 7] --
│ └─Flatten: 2-13 [64, 3136] --
│ └─Linear: 2-14 [64, 128] 401,536
│ └─ReLU: 2-15 [64, 128] --
│ └─Dropout: 2-16 [64, 128] --
│ └─Linear: 2-17 [64, 10] 1,290
======================================================================
Total params: 467,818
Trainable params: 467,818
Non-trainable params: 0
Total mult-adds (Units.GIGABYTES): 1.20
======================================================================
Input size (MB): 0.20
Forward/backward pass size (MB): 38.61
Params size (MB): 1.87
Estimated Total Size (MB): 40.68
======================================================================
Z niemal pół miliona parametrów, ten model przyćmiewa inne pod względem pojemności. Ale się opłaca.
Strong CNN (467818 parameters)
Test Accuracy: 99.09% | Loss: 0.03 | Learning time: 75.0sKluczowe obserwacje
-
Najwyższa dokładność: StrongCNN osiąga 99,09% dokładności testowej, zbliżając się bardzo do wydajności na poziomie człowieka w MNIST.
-
Regularyzacja ma znaczenie: Przy tak dużej liczbie parametrów, dropout jest kluczowy, aby uniknąć przeuczenia.
-
Koszt wydajności: Czas treningu jest prawie 3× dłuższy niż w przypadku MLP i 6× więcej parametrów niż w zrównoważonym CNN.
Ten model jest przesadny dla MNIST - ale o to chodzi. Ilustruje, jak daleko można zajść, gdy dokładność jest jedynym celem.
Podsumowanie: Porównanie wszystkich czterech modeli
Podsumujmy z boku:
| Model | Parametry | Dokładność testowa | Strata | Czas trenowania |
|---|---|---|---|---|
| MLP | 25 450 | 95,96% | 0,14 | 8,7s |
| TinyCNN | 4 266 | 97,96% | 0,06 | 12,3s |
| CNN | 26 698 | 98,22% | 0,05 | 14,3s |
| StrongCNN | 467 818 | 99,09% | 0,03 | 75,0s |
Wnioski
Eksperyment ten pokazuje, jak wybory architektoniczne wpływają na wydajność w sieciach neuronowych. Nawet dla prostego zbioru danych, takiego jak MNIST:
- MLP działają, ale ignorują strukturę obrazu.
- CNN wykorzystują cechy przestrzenne dla lepszych wyników.
- Głębokość i szerokość zwiększają dokładność, ale podnoszą koszty treningu i ryzyko przeuczenia.
- Regularyzacja jest niezbędna dla głębszych sieci.
Modele konwolucyjne przewyższają MLP nie dlatego, że są „głębsze” lub „fajniejsze”, ale dlatego, że rozumieją, jak działają obrazy.
Te wyniki odzwierciedlają szersze trendy zauważane w badaniach stanowiących szczyt techniki:
-
Modele konwolucyjne pozostają podstawą klasyfikacji MNIST, oferując silne indukcyjne przesunięcia dla struktury obrazu.
-
Techniki takie jak dropout, augmentacja danych i głębokie architektury są kluczowe dla poprawy wydajności.
-
Bardziej zaawansowane modele, takie jak sieci kapsułkowe, hybrydy transformatorów i zespoły, przesunęły dokładność ponad 99,85%, chociaż te metody często są przesadzone dla MNIST i wymagają znacznie więcej mocy obliczeniowej.
Nasze eksperymenty potwierdzają, że CNN są nie tylko dokładniejsze niż MLP - są również bardziej wydajne i lepiej przystosowane do zadań opartych na obrazach. Chociaż modele SOTA nadal przesuwają granice, nasze praktyczne modele już osiągają wysoką dokładność przy ułamku złożoności.
Other articles
You can find interesting also.

Wzorzec pull-push ZeroMQ dla Node JS
Artykuł podkreśla elastyczność ZeroMQ w zakresie przesyłania wiadomości w Node.js, zwracając uwagę na wzór pull-push, idealny dla rozproszonych systemów o dużej wydajności.
Daniel Gustaw
• 3 min read
Implementacja QuickSort w Rust, Typescript i Go
Opanuj QuickSort dzięki naszemu szczegółowemu przewodnikowi oraz przykładom implementacji w trzech popularnych językach programowania, aby szybko i efektywnie sortować duże zbiory danych.
Daniel Gustaw
• 5 min read

Atak XSS przy użyciu stylu skryptu i obrazu
Dowiedz się, jak zainfekować stronę za pomocą ataku XSS przy użyciu tagów skryptu, stylu lub obrazu. Możesz zobaczyć, jak zastąpić zawartość strony swoją własną, nawet bez javascriptu.
Daniel Gustaw
• 4 min read